


D3PZ-1100-P3 Delta Roboter
Produit charakteristesche
Charakteristesch
1, D'Standard Zyklus Zäit ass manner wéi 0.45s, treffen Är Verfollegung fir déi maximal Geschwindegkeet a wirtschaftlech.
2、Fortgeschratt Design vun Hooke gemeinsame an der Rotatiounsachs, erméiglecht de Roboter einfach mat der héich-Intensitéit repetitive Operatioun eens.
3, De Roboter ass ideal fir High-Speed-Produktioun an der Liewensmëttel- a Medizinindustrie.Vill an der Montage, Handhabung a Pick-and-Plaz vu klenge Materialien benotzt.
Produit Parameteren
| Typ | D3PZ-1100-P3 | |
| Axen | 3+1 | |
| Notzlaascht | 3kg vun | |
| Manipulator | Gewiicht | 90 ,5kg |
| Duerchmiesser | 1100 mm | |
| Widderhuelbarkeet | Positioun | 0,05 mm ép |
| Rotatioun | 0,1º | |
| Rotatioun Range | ± 360° | |
| Max Geschwindegkeet | 600 pp/min | |
| Erlaabt Maximum Inertiamoment | 31 × 10-4kg .m2 | |
| Wénkel Range vun actuated Arm | Op | 24,5º |
| Down | 73, 5o | |
| Stroumversuergung | Dräi-Phas 380VAC -10%~+10%, 49~61HZ | |
| Kraaft Kapazitéit | 10 KVA an | |
| Bewäert Kraaft | 6 ,1kw | |
| Späichertemperatur | -10 ℃ ~ 70 ℃ | |
| Aarbecht Ëmwelt | -10℃~50℃,RH≤80% | |
| Schutz | IP55/IP67 | |
Produit Zeechnen
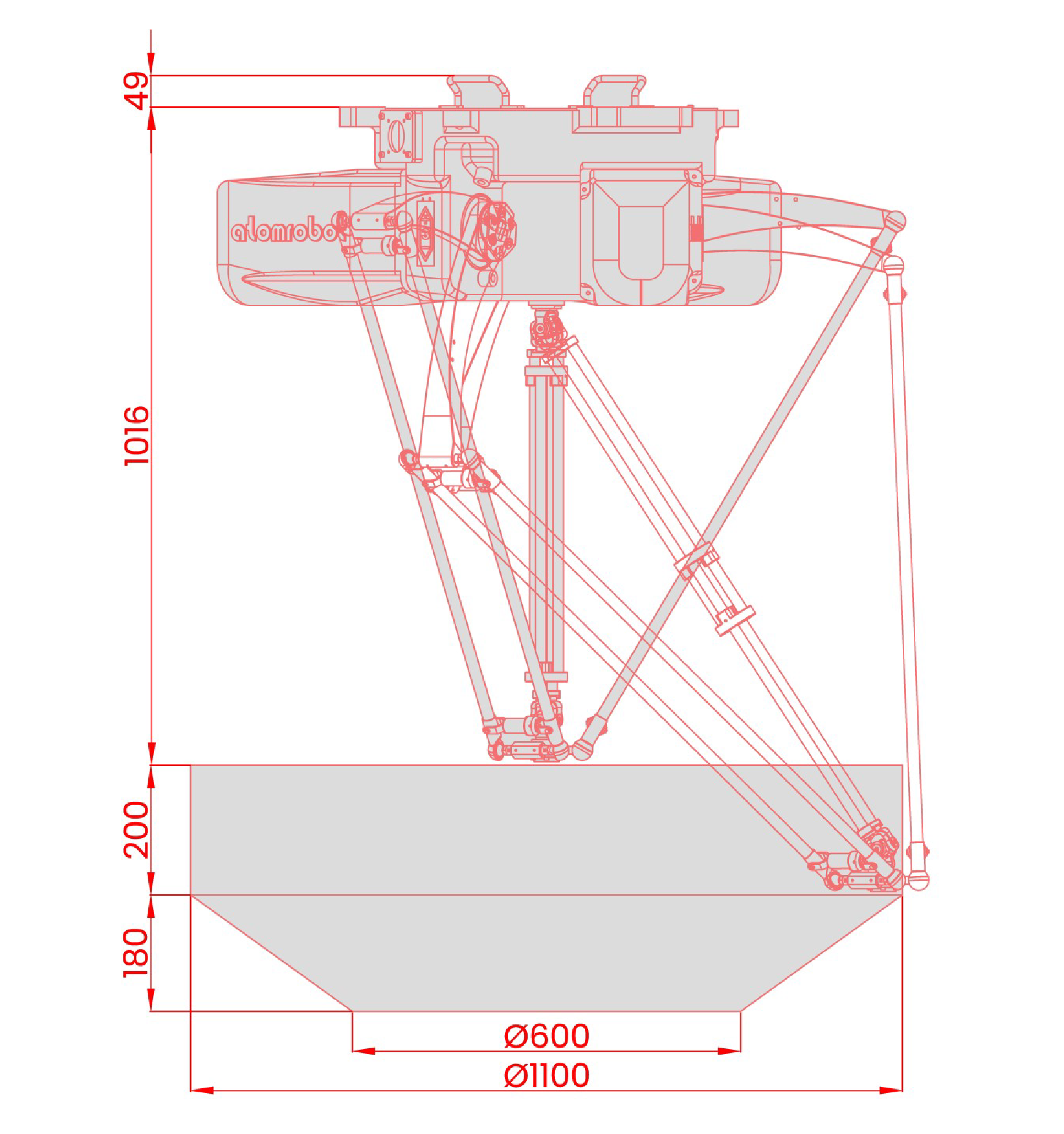
01.Dimensiounen an Aarbechtsberäich (mm)
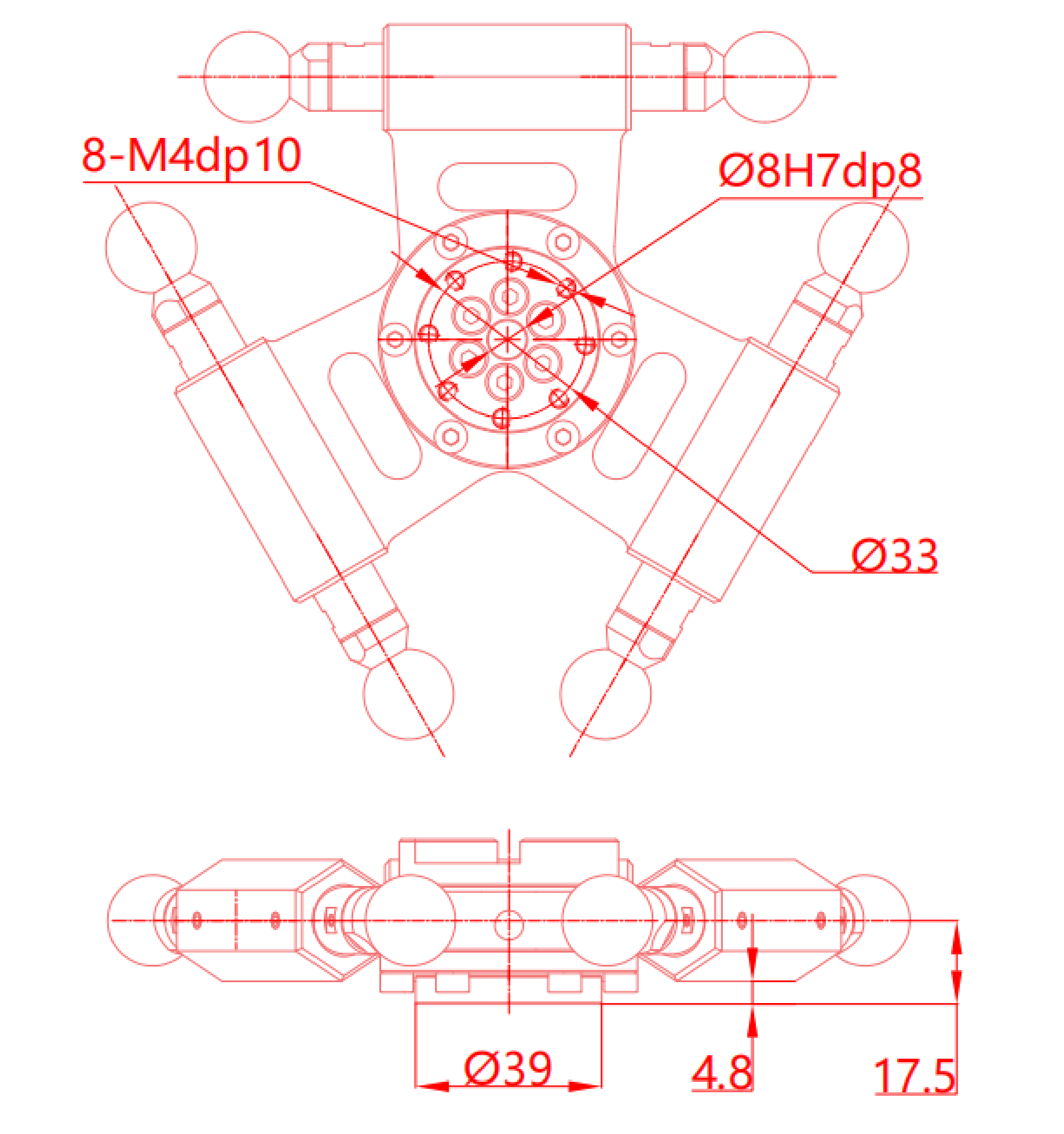
02. Flange (mm)
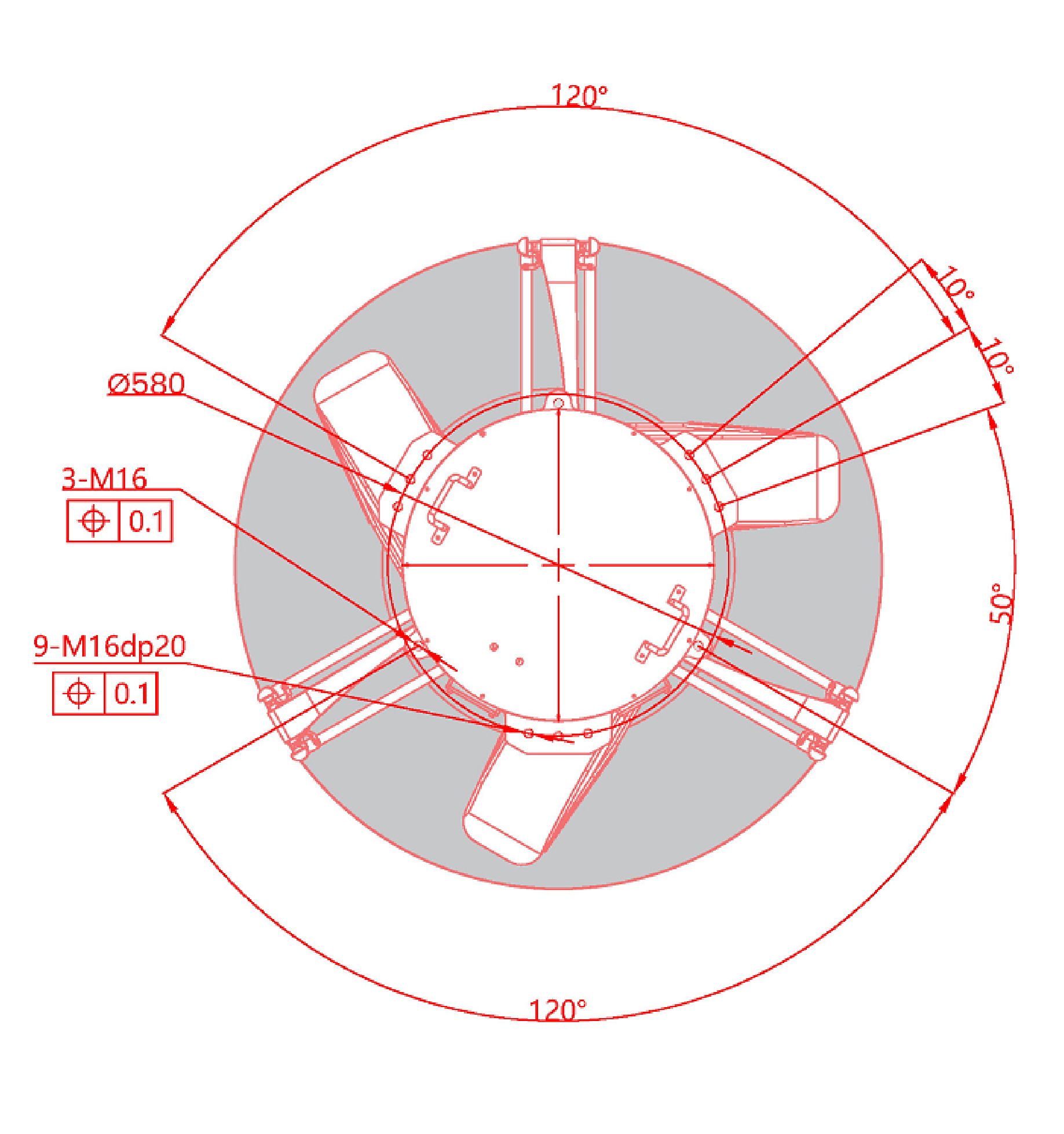
03.Basis Installatioun (mm)
Schreift Äre Message hei a schéckt en un eis


