D3PMZ-1100-P3 Delta Roboter
Produit charakteristesche
Charakteristesch
1, D'Standard Zyklus Zäit ass manner wéi 0.5s, treffen Är Verfollegung fir déi héich Vitesse an de Minimum Volume.
2, Fortgeschratt Design vun der Rotatiounsmotor Motor op Plënneren Platform, erméiglecht de Roboter einfach héich Rotatioun Präzisioun z'erreechen.
3, De Roboter ass ideal fir schmuel Raum Operatiounen, souwéi héich-Vitesse an héich-Präzisioun am 3C Terrain.Vill an der Montage, Ëmgank an Testen vu klengen Aarbechtsstécker benotzt.
Produit Parameteren
| Typ | D3PMZ-1100-P3 | |
| Axen | 3+1 | |
| Notzlaascht | 3kg vun | |
| Manipulator | Gewiicht | 85kg vun |
| Duerchmiesser | 1100 mm | |
| Widderhuelbarkeet | Positioun | 0,05 mm ép |
| Rotatioun | 0,05º | |
| Rotatioun Range | ± 360° | |
| Max Geschwindegkeet | 540 pp/min | |
| Erlaabt Maximum Inertiamoment | 31 × 10-4kg .m2 | |
| Wénkel Range vun actuated Arm | Op | 32, 5o |
| Down | 68, 5o | |
| Stroumversuergung | Dräi-Phas 380VAC -10%~+10%, 49~61HZ | |
| Kraaft Kapazitéit | 10 KVA an | |
| Bewäert Kraaft | 6 ,1kw | |
| Späichertemperatur | -10 ℃ ~ 70 ℃ | |
| Aarbecht Ëmwelt | -10℃~50℃,RH≤80% | |
| Schutz | IP55/IP67 | |
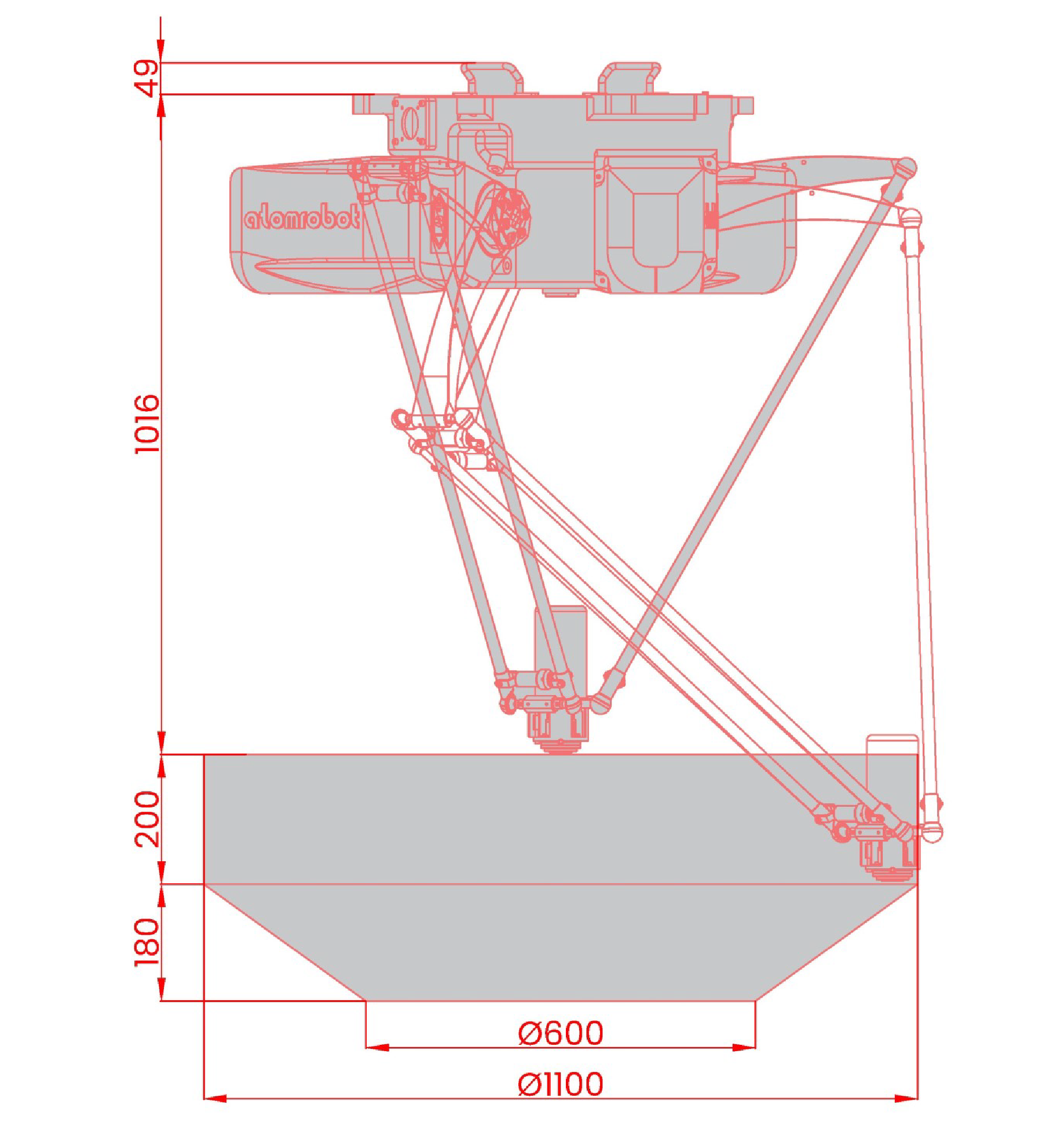
Produit Zeechnen
01.Dimensiounen an Aarbechtsberäich (mm)
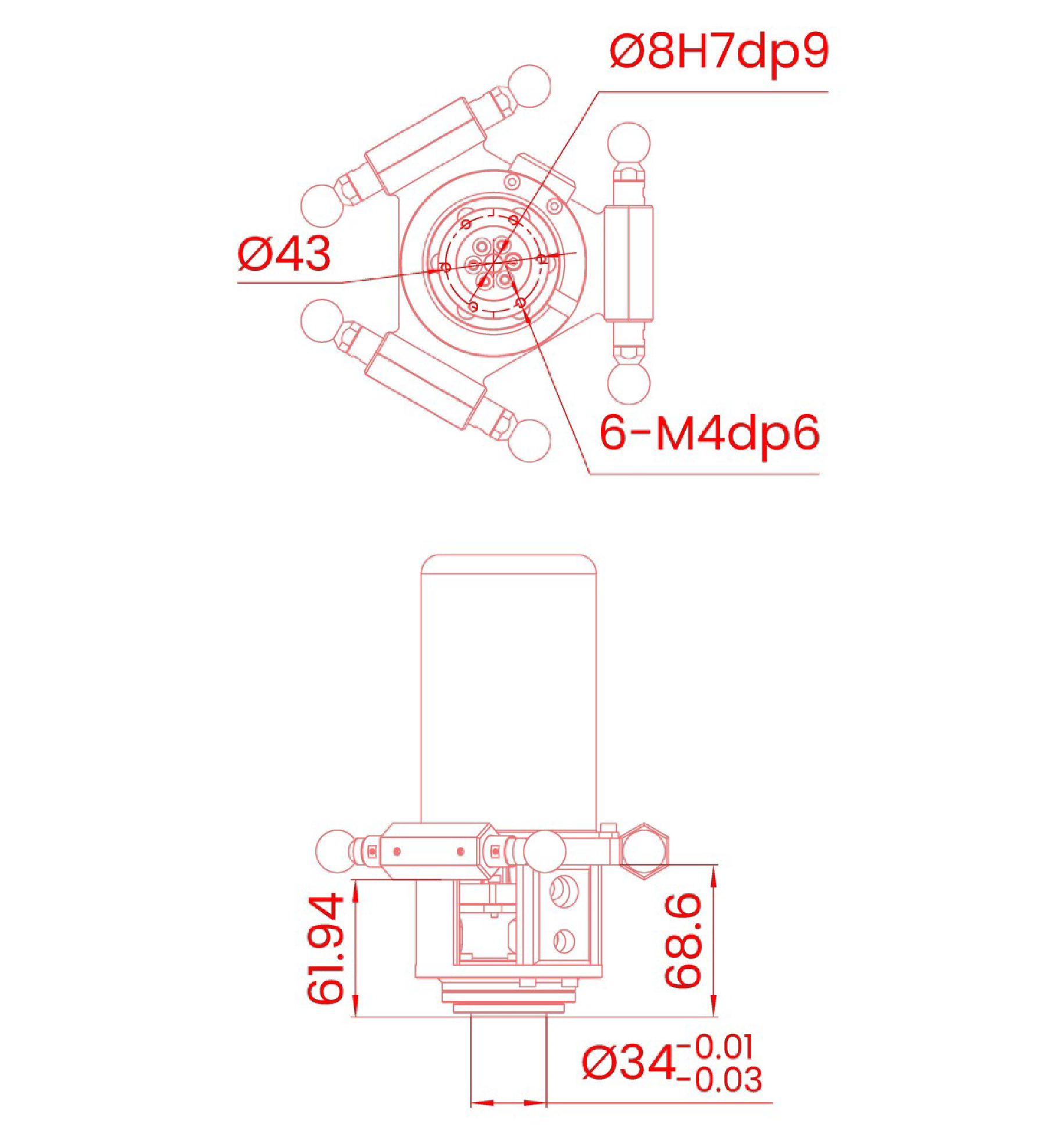
02. Flange (mm)
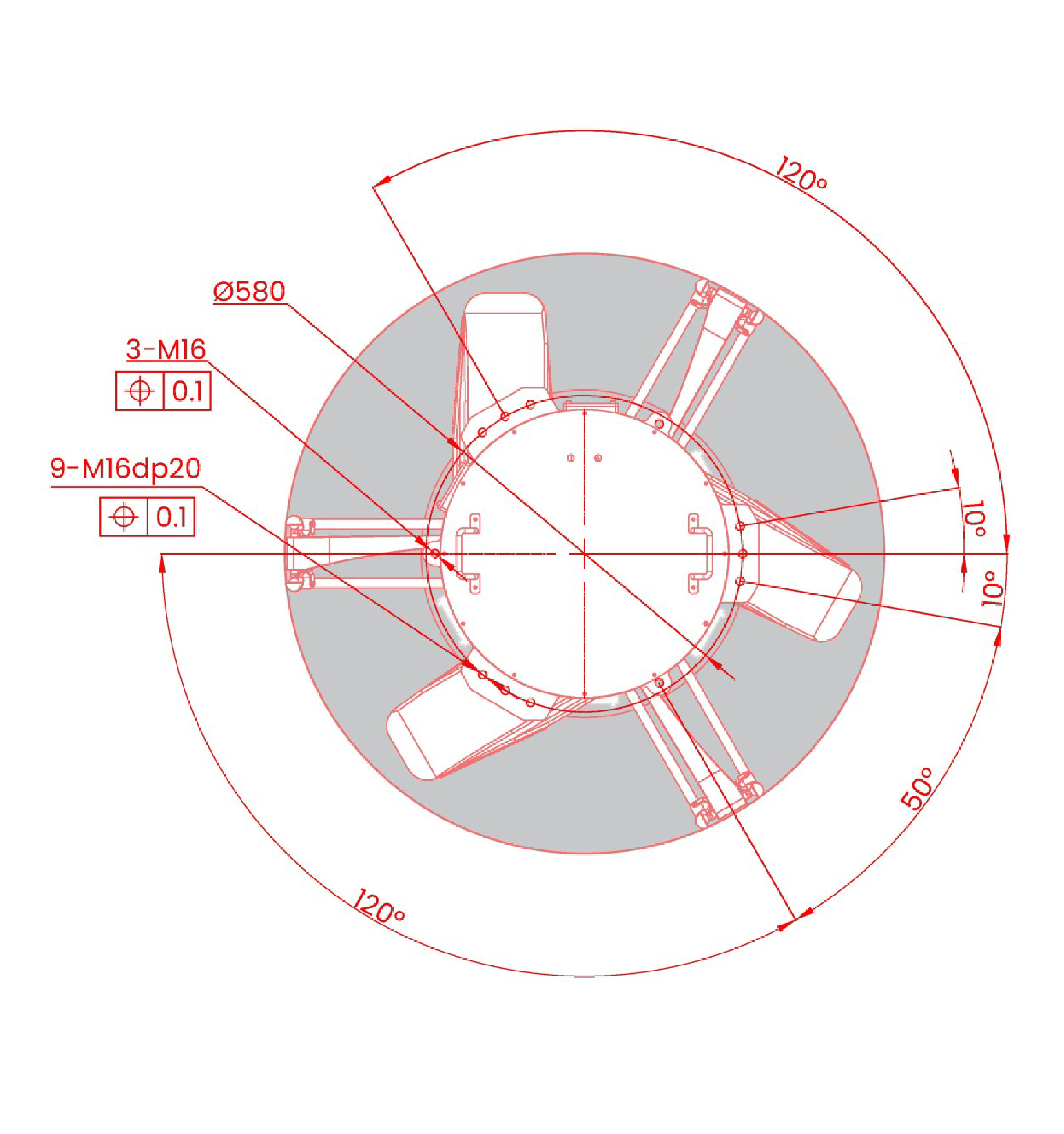
03.Basis Installatioun (mm)
Schreift Äre Message hei a schéckt en un eis