

D3PM-2200-P25 Delta Roboter
Produit charakteristesche
Charakteristesch
1, D'Standard Zyklus Zäit ass manner wéi 0.67s, passende Är Ufro fir d'Héichgeschwindegkeet a schwéier Pflicht fidderen.
2、Fortgeschratt Design vun der drëtter Achs Motor op Plënneren Platform, erméiglecht de Roboter einfach héich Rotatioun Präzisioun z'erreechen.
3, De Roboter ass ideal fir schwéier Operatiounen, souwéi Héichgeschwindegkeet an héich Präzisioun.
Produit Parameteren
| Typ | D3PM-2200-P25 | |
| Axen | 3+1 | |
| Notzlaascht | 25kg vun | |
| Manipulator | Gewiicht | 153 kg |
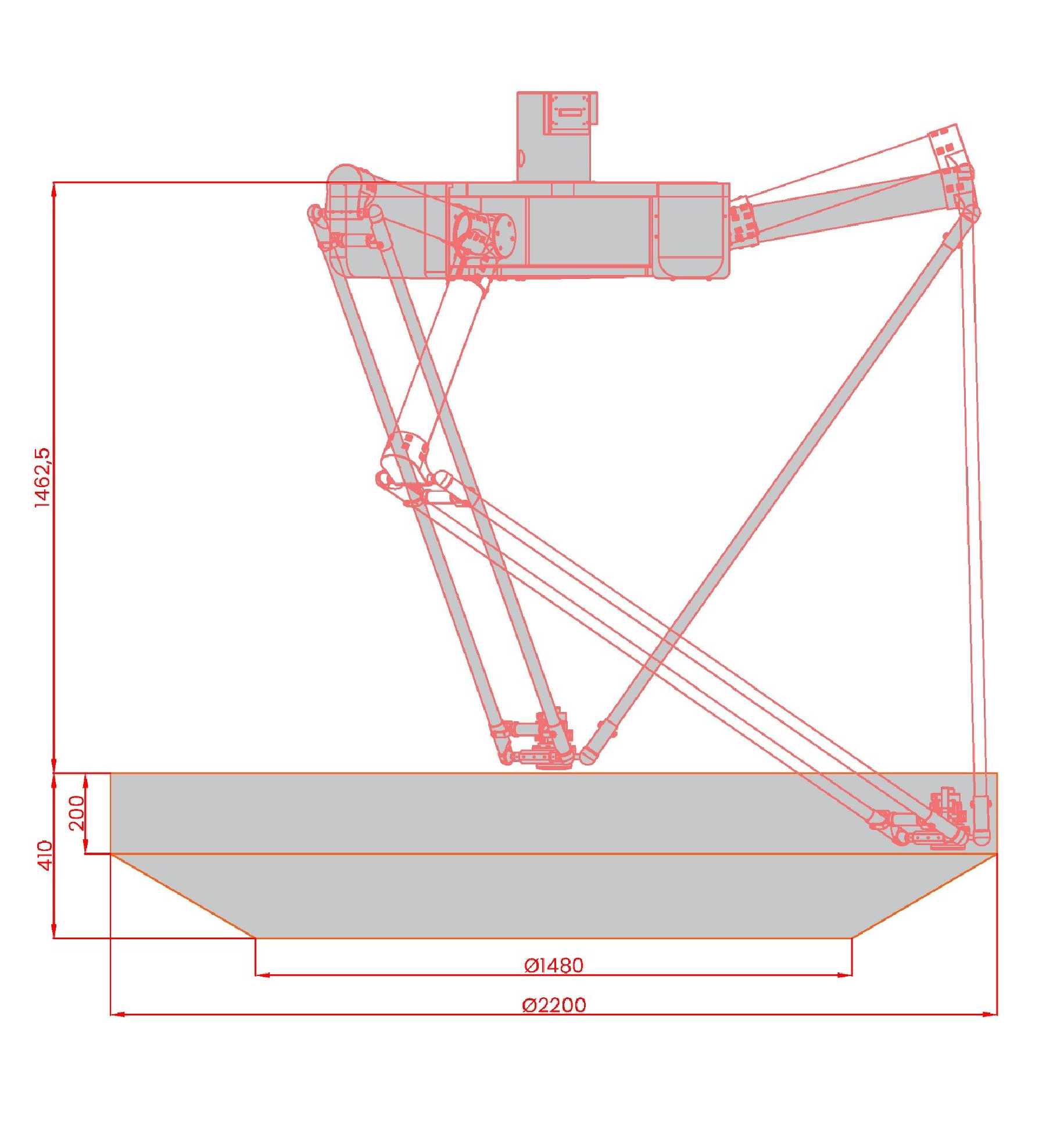
| Duerchmiesser | 2200 mm | |
| Widderhuelbarkeet | Positioun | 0,05 mm ép |
| Rotatioun | 0,05° | |
| Max Geschwindegkeet | 180 pp/min | |
| Rotatioun Range | ± 360 | |
| Erlaabt Maximum Inertiamoment | 0,224 kg .m2 | |
| Wénkel Range vun actuated Arm | Op | 33, 2o |
| Down | 78, 5o | |
| Stroumversuergung | Dräi-Phas 380VAC -10%~+10%, 49~61HZ | |
| Kraaft Kapazitéit | 15 KVA an | |
| Bewäert Kraaft | 9 ,2kw | |
| Späichertemperatur | -10 ℃ ~ 70 ℃ | |
| Aarbecht Ëmwelt | -10℃~50℃,RH≤80% | |
| Schutz | IP55 Eng | |
Produit Zeechnen
01.Dimensiounen an Aarbechtsberäich (mm)
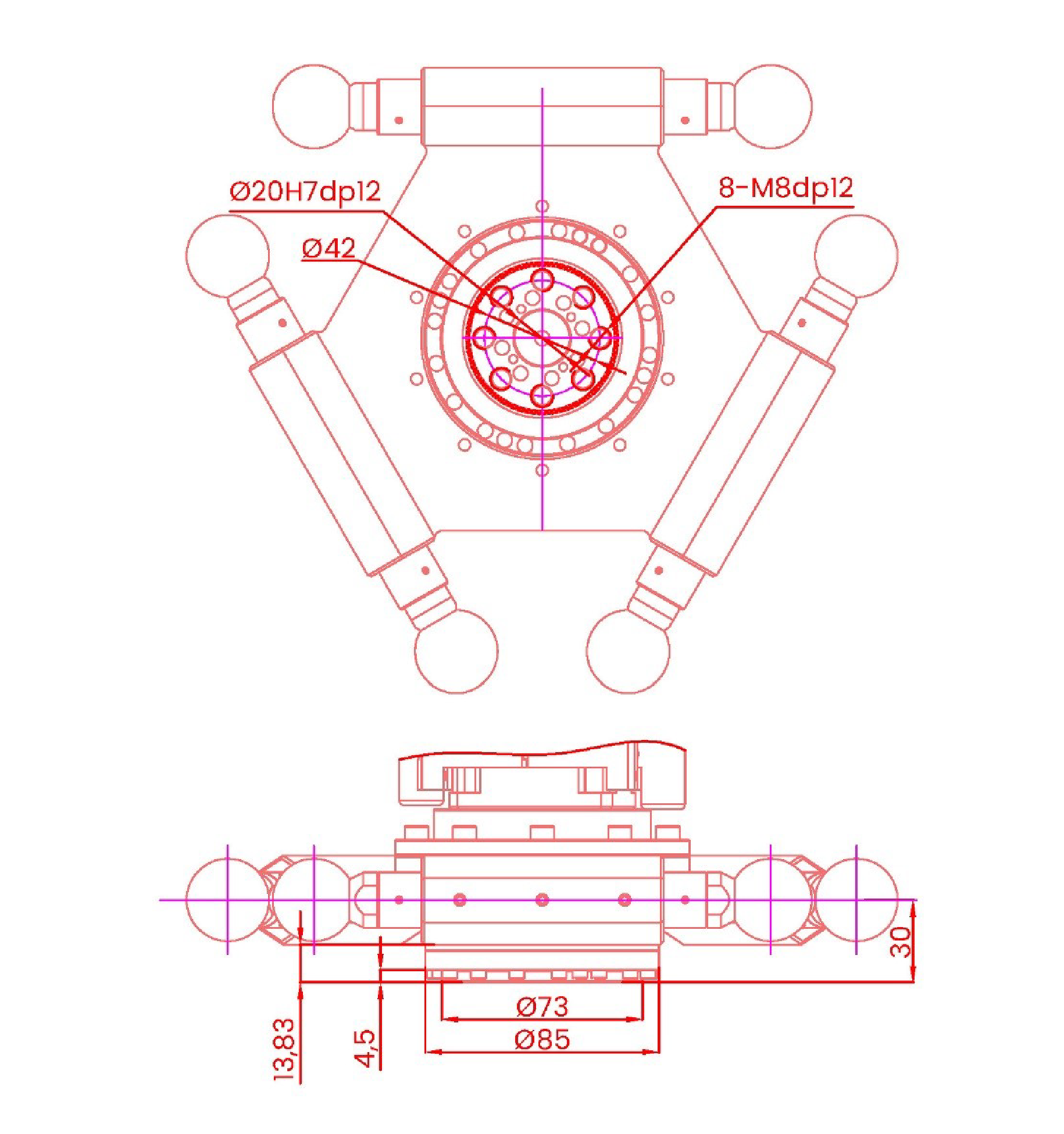
02. Flange (mm)
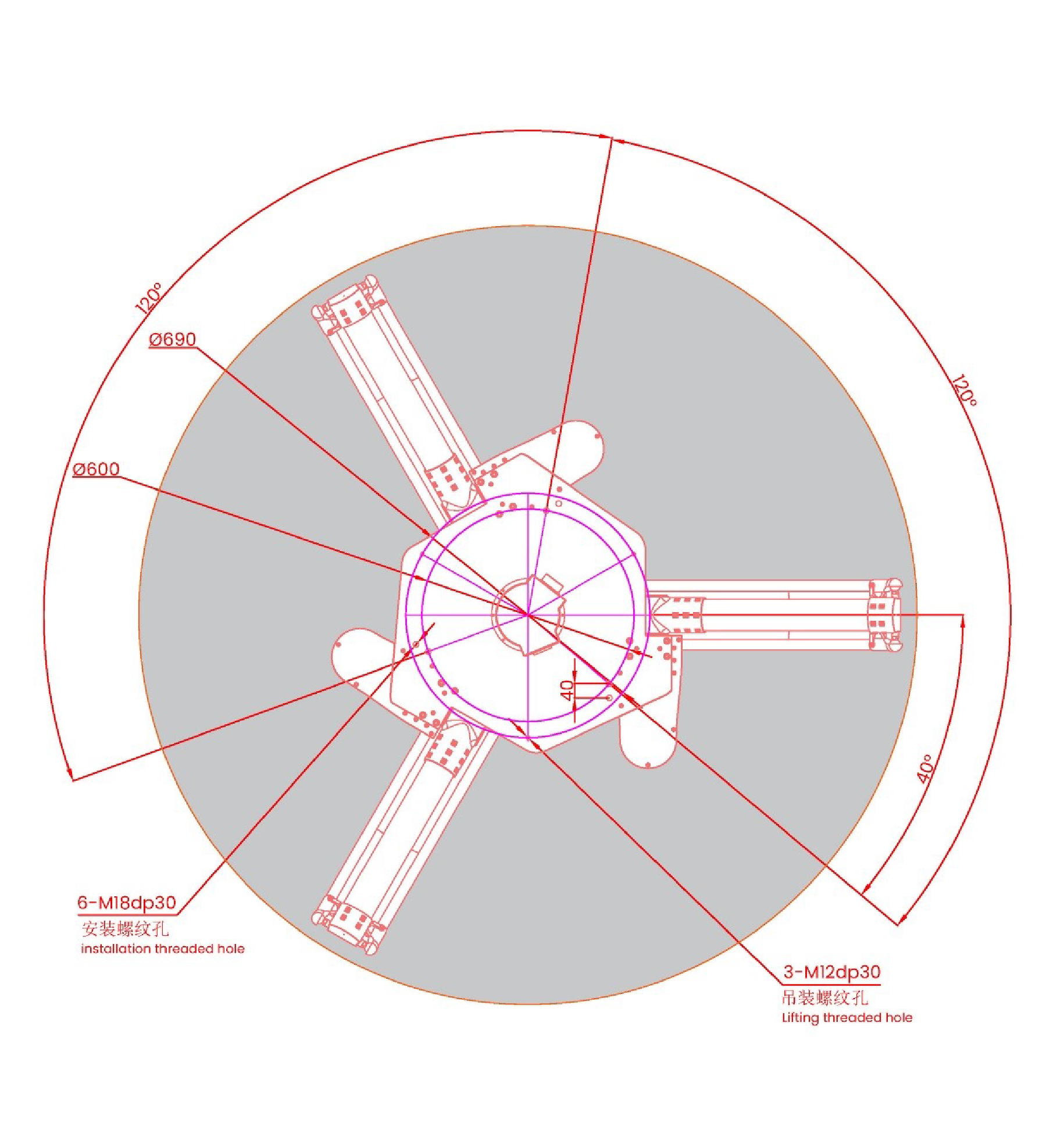
03.Basis Installatioun (mm)
Schreift Äre Message hei a schéckt en un eis





